


Hey daar! Ik ben Greg, en ik ben begonnen met bouwen in 2016. Sindsdien heb ik het altijd het leukst gevonden om dingen met de hand in elkaar te zetten. M’n eerste robot heb ik op de zolder van onze toenmalige woning aan een oude salontafel in elkaar gezet, en toen we in onze huidige woning trokken werd de garage al snel omgebouwd tot werkplaats.
Ik bouw zelf in de beetleweight klasse van 1,5 kg – een klasse waarbij onderdelen betaalbaar blijven, en de robot zelf ook makkelijk mee te nemen is naar evenementen. Als ik naar de grote beetleweight events ga in Groot-Brittannië past de robot met alle gereedschap en reserveonderdelen makkelijk in m’n ruimbagage.
Heden ten dage maken vele robots binnen deze gewichtsklasse gebruik van 3D-printing, CNC-frezen en/of het laser- of watersnijden van onderdelen, en het is makkelijk te zien waarom; in een sport waar reserveonderdelen belangrijk zijn, is het gemak van het produceren ervan ook van belang. Je kan dan op de computer checken of alles wel in het gewicht past, hoe het eruit ziet, om vervolgens onderdelen apart te laten maken.

Ik ben zelf nog van de oude stempel, en hou ervan om van de basismaterialen zelf wat moois te maken met de hand. Met een decoupeerzaag en een boor kom je al een heel eind – voeg daar nog een hittepistool aan toe voor het buigen van plastic, een haakse slijper voor het metaalwerk en een soldeerbout voor de elektronica en je zit gebakken.
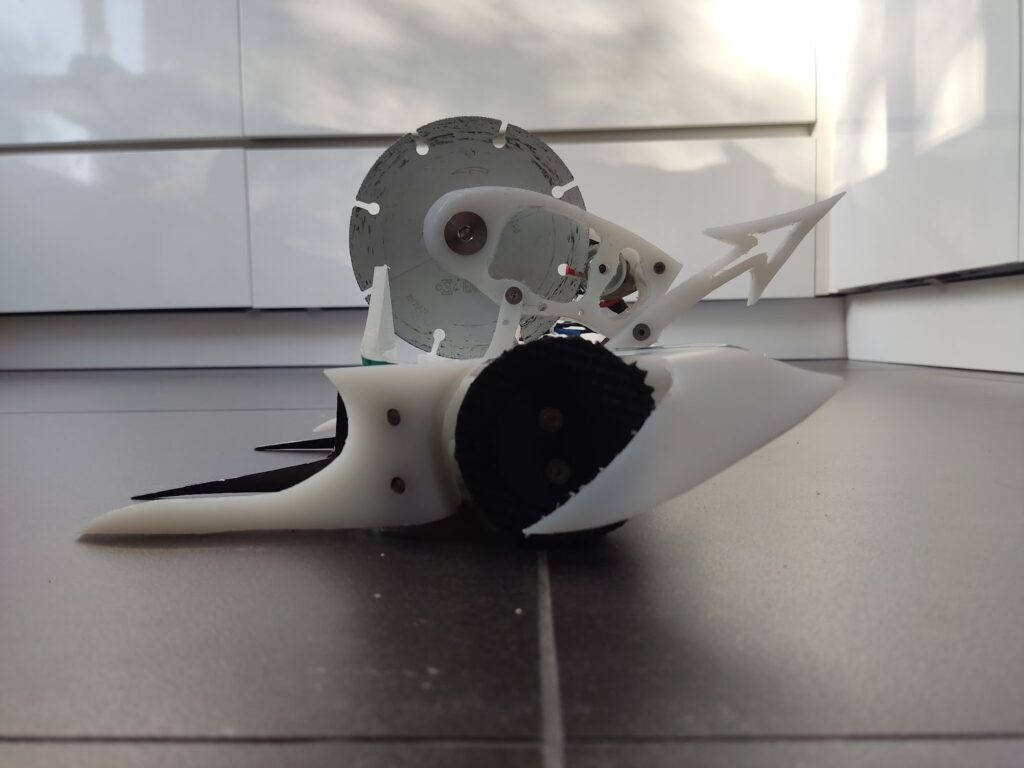
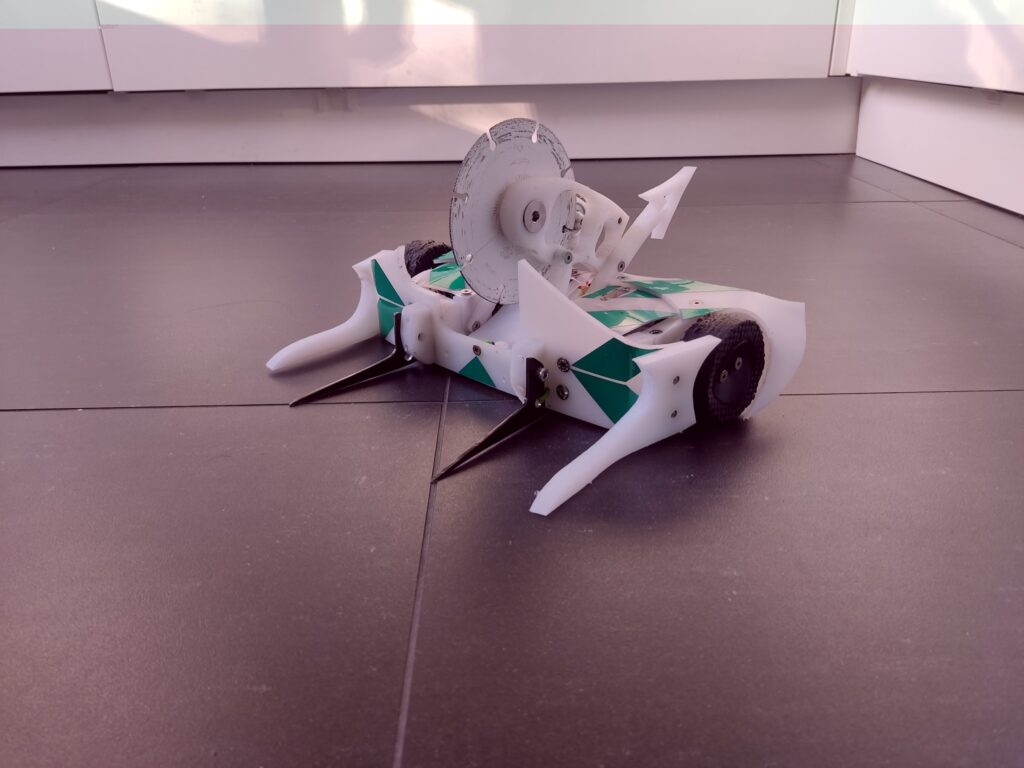
Ik hou ook van de wat atypischere machines. M’n huidige robot is ‘Head For The Exit’, welke een cirkelzaagblad heeft. De robot is gebouwd om de tegenstander te controleren, om vervolgens de cirkelzaag in actie te brengen. Hiervoor kan de cirkelzaagmodule in z’n geheel naar voren bewegen, middels een servo. Hierdoor maak ik gebruik van het dunne pantser wat vele tegenstanders aan de bovenkant hebben.

Het probleem met een dergelijk ingewikkeld wapen is echter gewicht. Alle machines hebben dezelfde limiet, en HFTE heeft voor z’n wapen twee bewegende delen nodig (d.w.z. de arm, en het zaagblad). Hierdoor heb ik altijd keuzes moeten maken, en gewicht moeten besparen waar dat ook maar kan. Waarom zou je het dan zo ingewikkeld maken, vraag je je af? Ik bouw zo’n machine omdat ik het cool vind, niet zozeer omdat het competitief is.

Momenteel ben ik bezig met de vierde versie van Head For The Exit. Door de jaren heen is het ontwerp steeds een beetje verder doorontwikkeld, maar de basis blijft hetzelfde:
1. Een chassis van HDPE-plaat, gebogen met een hittepistool en vastgezet met rampamoeren en inbusboutjes
2. Tanksturing, met brushless aandrijving
3. Een cirkelzaagblad met riemoverbrenging, ook brushless aangedreven
4. Een wapenarm bewogen door een servo
Qua electronica is veel online te krijgen via de Bristol Bot Builders, die snelheidsregelaars en kitjes verkopen. Het kleinere spul (zoals stekkertjes enzo) bestel ik dan vaak via Conrad.

Ik besef dat het bouwen van een eigen machine intimiderend lijkt, maar zoals je eerder hebt kunnen lezen kan je simpel beginnen, en leer je met elk bouwsel weer iets nieuws. Hierdoor is elke volgende versie weer net dat beetje beter dan de vorige. Ik ben indertijd begonnen met een Viper-kit zodat ik kon begrijpen hoe alles in elkaar stak – dat geeft een basis waar je op verder kan bouwen.
Mocht je er niet uitkomen, dan helpt de gemeenschap van bouwers je maar al te graag. De online fora van Dutch Robot Games en de Bristol Bot Builders staan bol van de informatie. Succes, en misschien tot in de arena!
Een gedetailleerde beschrijving van de bouw van Head for de Exit Mk2 en Mk3 zijn te vinden op Imgur :Mk2 , Mk3