Het bezoekje aan de MMM heeft weer veel inspiratie gegeven om wat moois te bedenken.
De combinatie van robots en quadcopters op het event hebben me op het volgende idee gebracht.
"Ik ga een multiwii flight controller in mijn robot bouwen"
Na wat hacken ben ik er achter gekomen dat het aanpassen van de huidige firmware geen succes is.
Maar door deze poging snap ik een stuk beter hoe deze controllers werken en is het idee van een robot controller geboren.
Een eerste prototype is inmiddels werkend en heeft de volgende functies:
Gereed en getest:
- CPPM receiver input
- Elev & Aile mixing
- Gear-idle & dead-band instellingen
- Failsafe en out of range detectie
- TB6612FNG 1A dual motor driver output (Antweight versie)
Volgende stap:
- Servo/ESC high refresh rate output (Smartmix versie)
- RC signaal kalibratie en opslag van instellingen in EPROM
Toekomst:
- Mixing & throttle curve instellingen
- Configuratie software voor PC
- Digitale uitgangen met timers voor bijvoorbeeld een relay
- Gyroscope
Om de code goed te testen en verder te ontwikkelen heb ik eerst een Antweight platform gemaakt.
Cookiemonster sloopt direct de keukenkastjes als er een foutje in de code zit

In de volgende stap wil ik de robot controller geschikt maken voor het zwaardere werk.
Deze versie krijgt 3 Servo/ESC uitgangen om de TZ85A regelaars van Cookiemonster aan te sturen.
Hier onder een paar foto's van de Antweight versie.
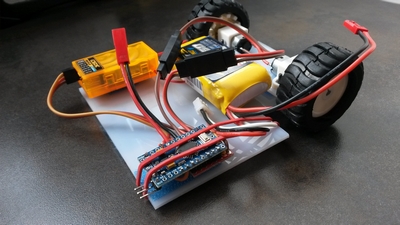
- Prototype robot controller
- proto1.jpg (74.57 KiB) 15250 keer bekeken
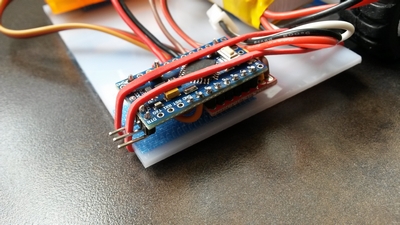
- Prototype robot controller
- proto2.jpg (78.2 KiB) 15250 keer bekeken


