back to tech [elektra en ontvangst]
Moderator: Moderators
-
Cavecrusher

- Berichten: 1497
- Lid geworden op: ma sep 01, 2003 5:35 pm
- Locatie: Tilburg


Het principe is simpel. Als je je zender uit zet, moet je robot met alles stoppen. Overigens is het zowiezo handig een apart batterijtje te gebruiken voor je ontvanger ivm storingen.kenshee schreef:Ik heb een vraagje ivm fail-saves. (voor in featherweights dan)
Is het ok dat ik een failsave op een apart kanaal zet en die dan de robot compleet uit zet bij een storing? (of manueel) De ontvanger krijgt dan wel gwn z'n aparte accu, anders bij de eerste storing gaat ie uit en blijft ie uit...
Peter
-
Skeletal Lord
- Berichten: 29
- Lid geworden op: zo aug 31, 2003 1:04 pm

Hangt er puur van af welke motoren, welke voltages en amperages, en wat je goedkoop noemt.
In essensie zijn de speedo's die wij goed noemen niet meer dan relais die snel aan en af schakelen om zo de motor in kleine sprintjes te laten werken.Effectief het toerenal verlagende,of anders gezegt het gemiddelde voltage verlagen of verhogen naar gelang de wens tot snelheid en kracht.
Alleen zijn de relais dan solid state en noemen we die transistors of de variantes fets, of mosfets.
Met de juiste keuze van materiaal is een relais besturing niet trager dan een goeie speedo, alleen heb je veel minder mogelijkheden qua besturing. Op en af is de keuze.
In P I zat een relaisbestring voor de overvolte startmotor. 130A schakelen is veel, en we deden dat met een perdure Albright SW88B- dit ompoolrelais kost de vrolijke 80 eu. Maar is nog steeds in een meer dan bruikbare staat, desondaks alle mishandelingen die het aangedaan hebben.
Een sterke motor gewoon op en af zetten zou ik doen met de Albright SW80B- met een prijskaartje van 33eu ook niet goedkoop.
Voor lichtere motoren-tot zo'n 10A stall- zijn de goedkope autorelais die je kan kopen bij een goeie autozaak of electronicacomponenten zaak een optie.
Nu de truk met de servo. Je neemt een servo en zet er een armpje of kruisje op; De uiteindes van deze armpjes laat je een microswitch indrukken.Die microswitches sturen op hun beurt een relais aan.
Sommigen onder ons hebben hier goeie ervaringen mee. Leo , Jeroen'n(zowel the roboteer formerly know as BillE als KOS) en Micha kunnen het beter uitleggen dan ik. Ik heb vanaf dag 1 geopteerd voor een RC relais- waar Bugs uiteindelijk een versie van gemaakt heeft die volledig op onze maat is gesneden.(in bepaalde omstandigheden kunnen deze Bugs Relais een kleine motor gerust sturen)
In essensie zijn de speedo's die wij goed noemen niet meer dan relais die snel aan en af schakelen om zo de motor in kleine sprintjes te laten werken.Effectief het toerenal verlagende,of anders gezegt het gemiddelde voltage verlagen of verhogen naar gelang de wens tot snelheid en kracht.
Alleen zijn de relais dan solid state en noemen we die transistors of de variantes fets, of mosfets.
Met de juiste keuze van materiaal is een relais besturing niet trager dan een goeie speedo, alleen heb je veel minder mogelijkheden qua besturing. Op en af is de keuze.
In P I zat een relaisbestring voor de overvolte startmotor. 130A schakelen is veel, en we deden dat met een perdure Albright SW88B- dit ompoolrelais kost de vrolijke 80 eu. Maar is nog steeds in een meer dan bruikbare staat, desondaks alle mishandelingen die het aangedaan hebben.
Een sterke motor gewoon op en af zetten zou ik doen met de Albright SW80B- met een prijskaartje van 33eu ook niet goedkoop.
Voor lichtere motoren-tot zo'n 10A stall- zijn de goedkope autorelais die je kan kopen bij een goeie autozaak of electronicacomponenten zaak een optie.
Nu de truk met de servo. Je neemt een servo en zet er een armpje of kruisje op; De uiteindes van deze armpjes laat je een microswitch indrukken.Die microswitches sturen op hun beurt een relais aan.
Sommigen onder ons hebben hier goeie ervaringen mee. Leo , Jeroen'n(zowel the roboteer formerly know as BillE als KOS) en Micha kunnen het beter uitleggen dan ik. Ik heb vanaf dag 1 geopteerd voor een RC relais- waar Bugs uiteindelijk een versie van gemaakt heeft die volledig op onze maat is gesneden.(in bepaalde omstandigheden kunnen deze Bugs Relais een kleine motor gerust sturen)
Beter nu creperen, dan in de wars repareren.
-
leo-rcc

- Site Admin
- Berichten: 5882
- Lid geworden op: do aug 21, 2003 9:55 pm
- Locatie: Hoogvliet-Rotterdam
- Contacteer:
Ompool relais halen het giswerk uit het met de klok mee/tegen de klok in draaien. heb je normale relais die alleen maken/verbreken moet je er iets meer aandacht aan besteden.

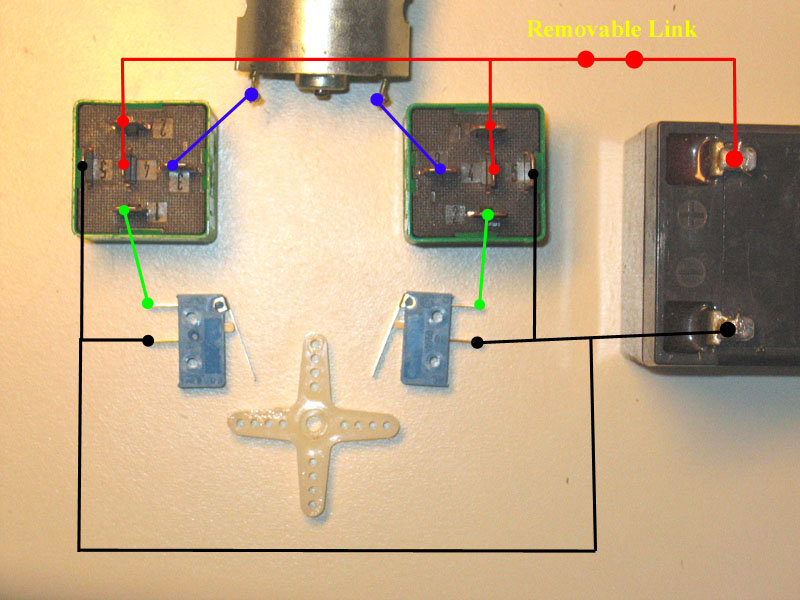
Om nu de motor M te laten draaien moet je relais H1 en L2 inschakelen voor een draairichting. Om ze dan om te schakelen naar de andere draairichting moeten H1 en L2 uitgeschakeld, en daarna H2 en L1 inschakelen.
Dat is het principe.
Zorg er altijd voor dat er altijd 2 relais dicht staan voor je de andere relais inschakeld. Anders heb je volle sluiting.
De relais die ik ervoor gebruikte waren deze:

de dunne connectoren in het midden schakelen de stroom in en uit op de grotere polen.
Om de relais in en uit te schakelen gebruikten we in RCC nummer 1 RC relais die een lage spanning afgaven aan de shakelconnectoren van de bovenstaande relais.
In Blackdevil Warzone gebruikten we daarvoor servo's die schakelaartjes indrukken. Dat was wat minder storingsgevoelig bij ons. In de bot van TKR zit op dit moment datzelfde systeem.
Beide manieren komen op hetzelfde neer, alleen zitten er bij RC relais geen bewegende delen, wat theoretich fijner is. RC relais zijn ook veel kleiner dan servo's en schakelaars. De RC relais die Bugs heeft ontworpen zijn ook veel beter ontstoord als de onze, waardoor ze aan betrouwbaarheid niet onder zouden moeten doen aan de servo/schakelaar optie.
Ik hoop dat je er wat aan hebt.
Om nu de motor M te laten draaien moet je relais H1 en L2 inschakelen voor een draairichting. Om ze dan om te schakelen naar de andere draairichting moeten H1 en L2 uitgeschakeld, en daarna H2 en L1 inschakelen.
Dat is het principe.
Zorg er altijd voor dat er altijd 2 relais dicht staan voor je de andere relais inschakeld. Anders heb je volle sluiting.
De relais die ik ervoor gebruikte waren deze:
de dunne connectoren in het midden schakelen de stroom in en uit op de grotere polen.
Om de relais in en uit te schakelen gebruikten we in RCC nummer 1 RC relais die een lage spanning afgaven aan de shakelconnectoren van de bovenstaande relais.
In Blackdevil Warzone gebruikten we daarvoor servo's die schakelaartjes indrukken. Dat was wat minder storingsgevoelig bij ons. In de bot van TKR zit op dit moment datzelfde systeem.
Beide manieren komen op hetzelfde neer, alleen zitten er bij RC relais geen bewegende delen, wat theoretich fijner is. RC relais zijn ook veel kleiner dan servo's en schakelaars. De RC relais die Bugs heeft ontworpen zijn ook veel beter ontstoord als de onze, waardoor ze aan betrouwbaarheid niet onder zouden moeten doen aan de servo/schakelaar optie.
Ik hoop dat je er wat aan hebt.
Mvg,
Leo van Miert
Team RCC website.
Gentlemen, no fighting please. This is, after all, a council of war.
Leo van Miert
Team RCC website.
Gentlemen, no fighting please. This is, after all, a council of war.
-
Team Twister

- Berichten: 91
- Lid geworden op: za aug 02, 2003 12:43 am
- Locatie: Bovenkarspel
- Contacteer:
weer een antennevraag..
weet iemand hoe een tornado of bignipper of storm twee hun antenne gemonteerd hebben?
Deze robots rijden vrolijk boven en onderste boven zonder dat ik een antenne kan vinden ze lijken gewoon een goede ontvangst te hebben.
Met twister kreeg ik dat vorig keer niet lekker voor elkaar en moest ik werken met een spriet die rechtopstaat en dat is een lastig verhaal als hij onderste boven ligt en ook is de constructie een stuk zwakker.
Any comments?
Sjaak
Deze robots rijden vrolijk boven en onderste boven zonder dat ik een antenne kan vinden ze lijken gewoon een goede ontvangst te hebben.
Met twister kreeg ik dat vorig keer niet lekker voor elkaar en moest ik werken met een spriet die rechtopstaat en dat is een lastig verhaal als hij onderste boven ligt en ook is de constructie een stuk zwakker.
Any comments?
Sjaak
-
leo-rcc
- Site Admin
- Berichten: 5882
- Lid geworden op: do aug 21, 2003 9:55 pm
- Locatie: Hoogvliet-Rotterdam
- Contacteer:
Hoe Tornado en Storm het deden weet ik niet, maar dit was het idee dat Pussycat gebruikte voor hun verbouwing:
Een polycarbonaat plaatje in de robot waarop de antenne in een patroon is gelegd als volgt:

Een polycarbonaat plaatje in de robot waarop de antenne in een patroon is gelegd als volgt:
Mvg,
Leo van Miert
Team RCC website.
Gentlemen, no fighting please. This is, after all, a council of war.
Leo van Miert
Team RCC website.
Gentlemen, no fighting please. This is, after all, a council of war.
-
Bugs

- Site Admin
- Berichten: 5433718
- Lid geworden op: zo jul 27, 2003 9:13 pm
- Locatie: Delft
- Contacteer:
Tornado en storm hebben beide een zeer flexibel antennetje aan de achterkant van hun bot zitten:
http://www.bugs.nl/media/album/view.php ... 9sdDQuanBn
http://www.bugs.nl/media/album/view.php ... YxLkpQRw==
http://www.bugs.nl/media/album/view.php ... 9sdDQuanBn
http://www.bugs.nl/media/album/view.php ... YxLkpQRw==
-
Team Twister
- Berichten: 91
- Lid geworden op: za aug 02, 2003 12:43 am
- Locatie: Bovenkarspel
- Contacteer:


vraagje over de failsafe, ik heb een systeem bedacht, waarin er 1 speedcontroller en 1 set relais word gebruikt om te sturen, alle aandrijfstroom word door de speedcontrol geleverd, en door de relais over de 2 motoren verdeeld (waardoor de tanksturing ontstaat) moet ik nou voor de relais ook een failsafe hebben (zo lang de speedcontroller geen gas geeft maakt het niets uit wat de relais doen op dat moment.)
de relais worden apart door een servo aangestuurd iig..
hoop dat het duidelijk is wat ik bedoel, de mensen die wel eens met de lego rc iets hebben gedaan weten iig wat voorn systeem ik bedoel, maar dan wat zwaarder uitgevoerd natuurlijk..)
de relais worden apart door een servo aangestuurd iig..
hoop dat het duidelijk is wat ik bedoel, de mensen die wel eens met de lego rc iets hebben gedaan weten iig wat voorn systeem ik bedoel, maar dan wat zwaarder uitgevoerd natuurlijk..)
-
leo-rcc
- Site Admin
- Berichten: 5882
- Lid geworden op: do aug 21, 2003 9:55 pm
- Locatie: Hoogvliet-Rotterdam
- Contacteer:
Failsafe zoals al eerder aangegeven is vrij simpel:
Zodra je geen (goed) signaal meer hebt in je robot, moet de robot stilvallen. Zodra het signaal herstelt mag deze weer hervatten. En dat word dus ook getest tijdens de tech checks.
Hoe je dat regelt is jouw zaak, zolang het maar werkt.
Zodra je geen (goed) signaal meer hebt in je robot, moet de robot stilvallen. Zodra het signaal herstelt mag deze weer hervatten. En dat word dus ook getest tijdens de tech checks.
Hoe je dat regelt is jouw zaak, zolang het maar werkt.
Mvg,
Leo van Miert
Team RCC website.
Gentlemen, no fighting please. This is, after all, a council of war.
Leo van Miert
Team RCC website.
Gentlemen, no fighting please. This is, after all, a council of war.